Freefastapp.net – Di era serba canggih ini, teknologi banyak berinovasi lebih berkembang. Salah satunya ada teknologi kolaboratif...
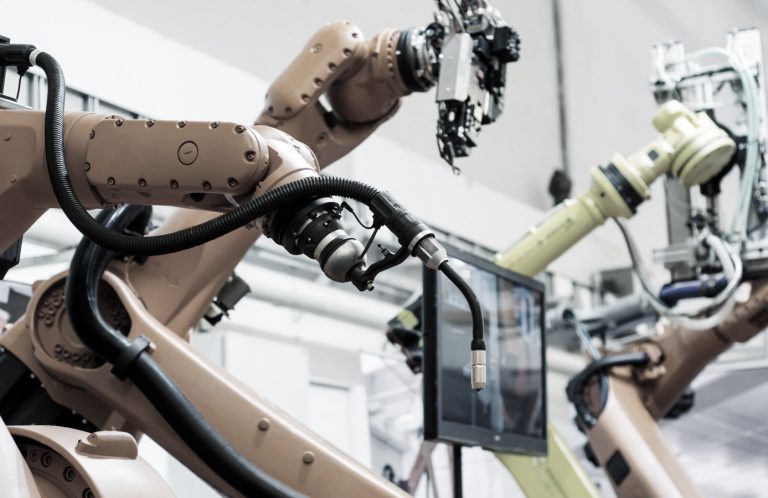
Penerapan Robot Kolaboratif

Freefastapp.net – Teknologi Robotik Kolaboratif, Pada zaman modern atau era teknologi yang sangat canggih dan terus berkembang...

Freefastapp.net – Teknologi Robotik Kolaboratif, Tak bisa dipungkiri lagi sekarang ini dengan meningkatkan teknologi di berbagai kalangan...
Freefastapp.net – Teknologi Robot Kolaboratif, Untuk memberikan pelayanan terbaik di dunia industri sekarang ini memang diperlukan adanya...

Freefastapp.net – Robotic kolaboratif yang juga sering disebut dengan cobot adalah suatu system yang tidak lagi terbatas...
Freefastapp.net – Robot kolaboratif merupakan suatu robot canggih yang diciptakan untuk dapat membantu pekerjaan manusia khususnya di...
Freefastapp.net – Teknologi kolaborasi robotic saat ini tengah berkembang pesat di dunia. Di mana manusia dan robot...
Freefastapp.net – Robot adalah suatu teknologi canggih yang sudah banyak saat ini membantu pekerjaan manusia dengan berbagai...

Freefastapp.net – Kehadiran daripada teknologi yang lebih canggih seperti robot memiliki fungsi yang lebih bermanfaat secara khusus...
Freefastapp.net – Di era teknologi yang terus berkembang, peran robot kolaboratif atau cobots telah menjadi sorotan utama...